Haoyang He
MRSD @ CMU Robotics Institute

Hi! My name is 何昊洋 (hé hào yáng). I’m pursuing Masters in Robotic Systems Development (MRSD) at Carnegie Mellon University Robotics Institute.
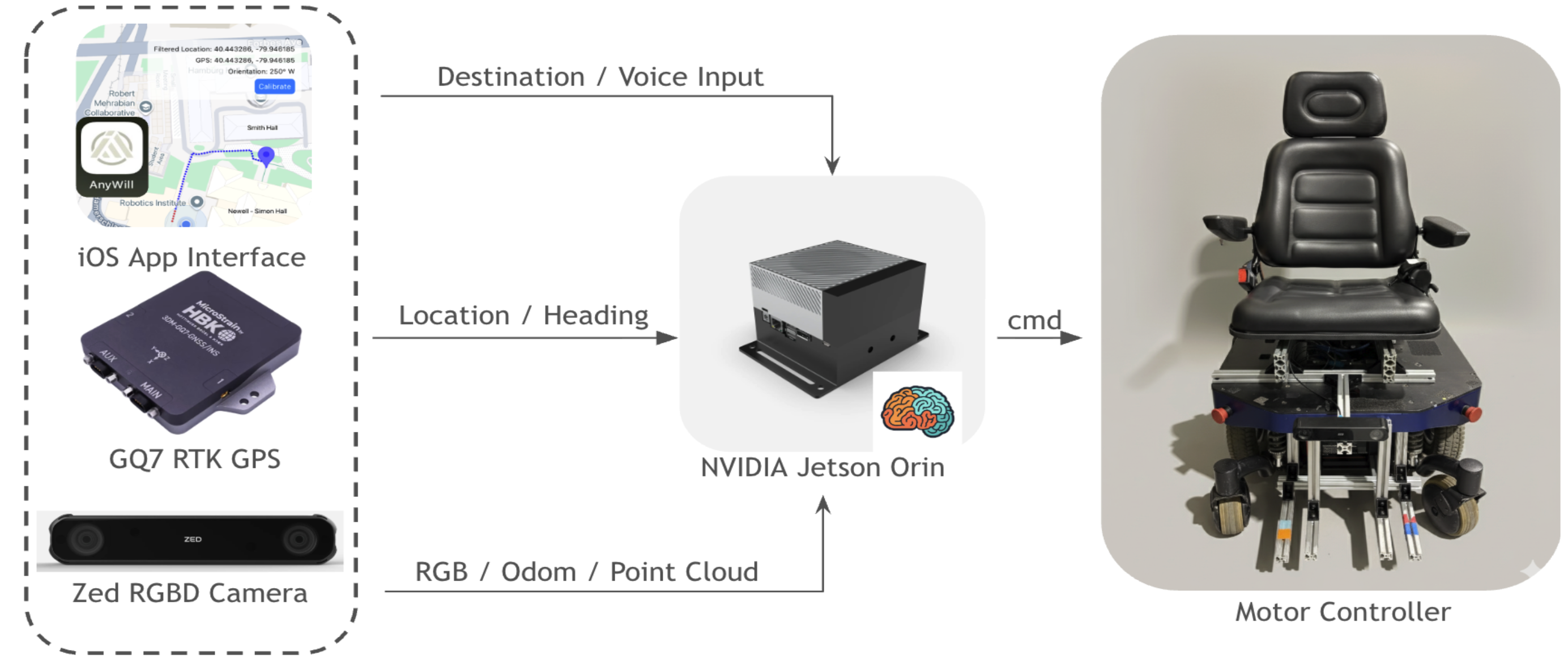
At the CMU AirLab, I work on VLM-based planning and spatial understanding. My capstone project AnyWill is centered around building a human-interactive autonomous wheelchair for outdoor urban navigation, working with Cherie Ho and Sebastian Scherer.
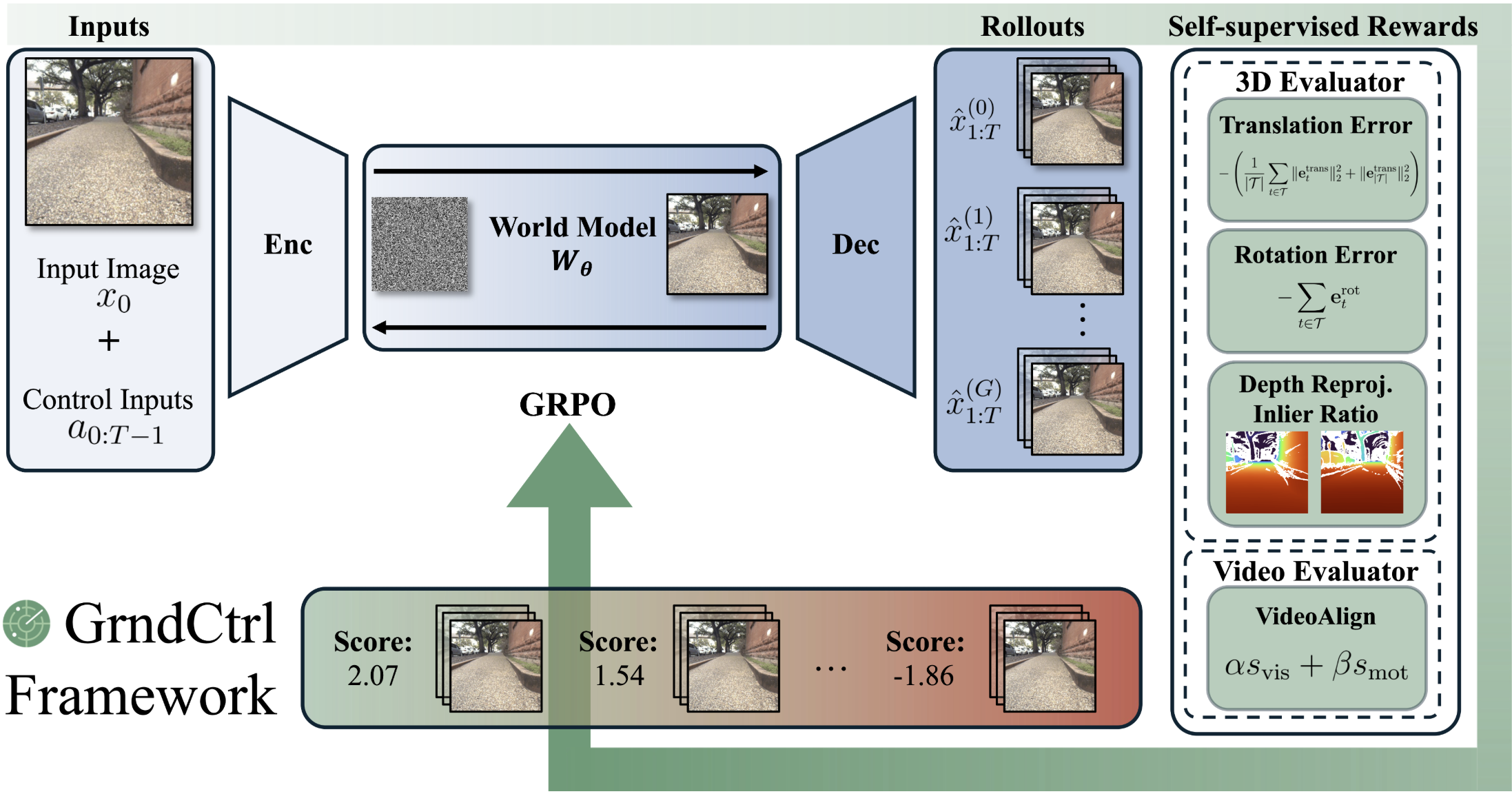
In parallel, I am a research intern at FieldAI, working on grounded world models and RL post-training for deployable robotics with Jay Patrikar and Shayegan Omidshafiei.
Previously, I obtained my Integrated M.S./B.S. in Electrical and Computer Engineering here at CMU within 4 years, during which I interned at Apple and Bilibili.
My research interests include foundation models for robotics, world modeling, and robot learning. I am particularly interested in leveraging the spatial and embodied reasoning from large-scale foundation models, including world models and vision-language models, in deployable robotics systems via grounded integration and alignment.